👉 Amazon:経験する機械(アンディ・クラーク) https://amzn.to/3RVdwZq
■序章|行動は“意志”ではなく“予測”で動く
私たちは、 「行動は意志で決めている」と考えがちだが、 本書が示すのはまったく別の構造。
行動とは、脳が“未来の身体状態”を予測し、 その予測を実現するために身体を動かすプロセスである。
つまり、 行動は“結果”ではなく、 予測の自己成就 として生まれる。
■1|脳は“未来の身体”を先に決めている
行動が起きるとき、脳はまず
「次の瞬間、身体はこう動いているはずだ」
という 未来予測(アクティブ・インフェレンス) を生成する。
- 腕が上がっているはず
- 足が前に出ているはず
- 視界がこう変わっているはず
この“未来の身体像”に現在の身体を合わせるため、 筋肉が動き、行動が生まれる。
行動とは、 未来予測に身体を同期させるプロセス。
■2|行動は“予測誤差を消すため”に起きる
脳は常に、 「予測した未来」と「実際の身体」のズレを最小化しようとする。
- 予測:腕が上がっているはず
- 現実:腕は下がっている → ズレを消すために腕が上がる(=行動)
この仕組みを アクティブ・インフェレンス(能動的推論) と呼ぶ。
行動とは、 予測誤差を減らすための“調整動作”。
■3|“自己充足的予測”としての行動
行動は、 脳が予測した未来を“実現するために起きる”。
- 「歩いているはず」→ 歩き出す
- 「手が伸びているはず」→ 手が伸びる
- 「声が出ているはず」→ 声が出る
行動は、 予測が自分自身を実現するプロセス。
意志よりも先に、 未来の身体が“決まっている”。
■4|習慣は“予測の自動化”である
習慣が強いのは、 未来予測が固定化されているから。
- 朝起きたらスマホを見る
- 帰宅したら冷蔵庫を開ける
- 緊張したら肩が上がる
これらは“意志”ではなく、 未来の身体予測が自動で走る ことで起きる。
習慣とは、 予測モデルが身体を先導する状態。
■5|不安・緊張も“未来予測の身体化”
不安や緊張は、 “未来の危険”を予測した結果として身体が反応する。
- 心拍が上がる
- 呼吸が浅くなる
- 身体が固まる
これらは“危険が来るはず”という予測に身体が合わせているだけ。
つまり、 情動も行動も、未来予測の身体化。
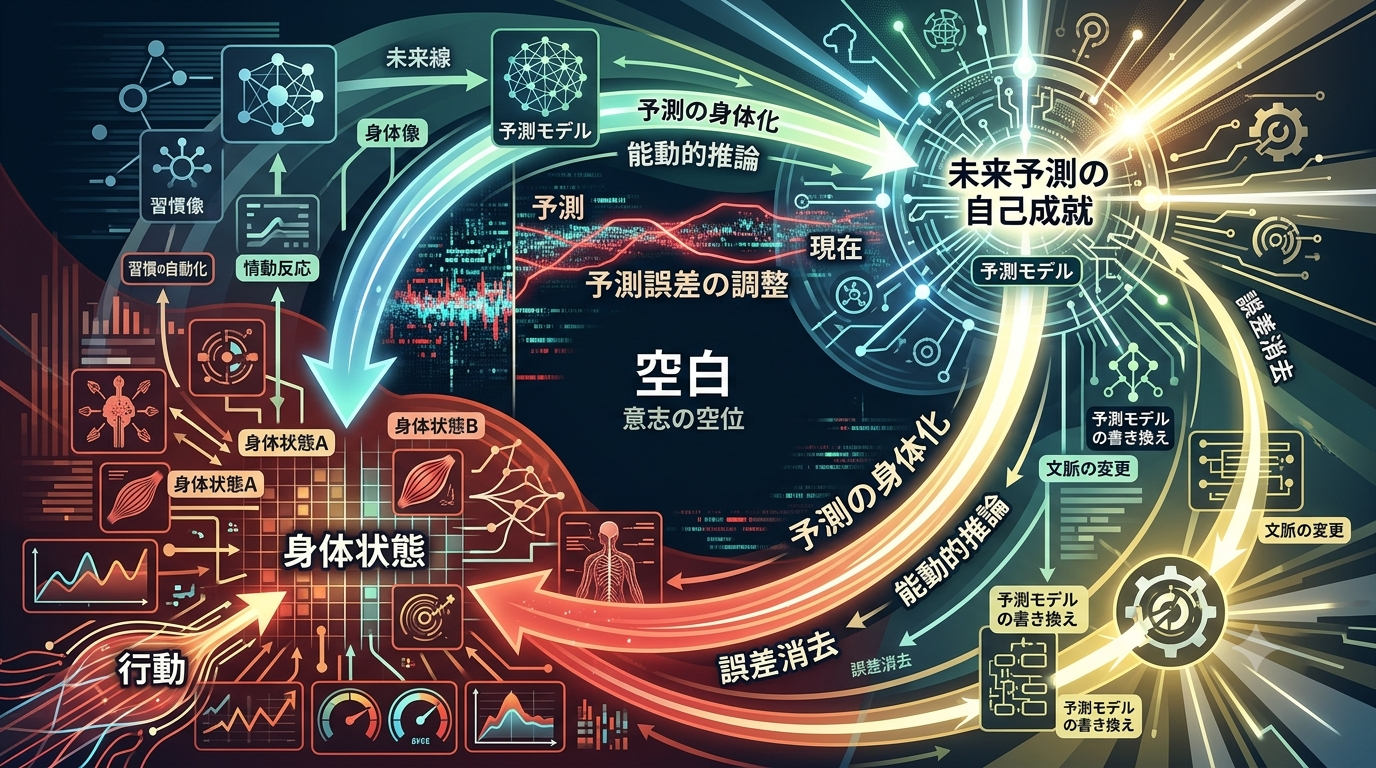
■6|行動を変えるには“予測を変える”しかない
行動は予測の自己成就なので、 行動だけを変えようとしても続かない。
必要なのは、
- 未来の身体像を変える
- 文脈を変える
- 予測誤差の扱い方を変える
という 予測モデルの書き換え。
行動は“結果”ではなく、 予測モデルのアウトプット だから。
■結論:行動は“未来の身体予測”が生む自己成就である
『経験する機械』が示すのは、 行動とは意志の産物ではなく、 脳が予測した未来を実現するためのプロセス だということ。
- 行動は予測の自己成就
- 未来の身体像が先に決まる
- 予測誤差を消すために身体が動く
- 習慣は予測の自動化
- 不安も“未来予測の身体化”
- 行動を変えるには予測を変える必要がある
行動とは、 脳が“未来線”を身体に落とし込む仕組み。
■出口(Amazonリンク)
経験する機械──心はいかにして現実を予測し構成するか https://amzn.to/3RVdwZq

コメント